|
OpenNI2 SDK
v2.3.0.81
|
|
OpenNI2 SDK
v2.3.0.81
|
| 操作系统 | 系统要求 | 详细信息 |
|---|---|---|
| Windows | • Windows 7、8和 10系统,32位和64位操作系统 • 基于x86架构的处理器@ 1.8+ GHz • USB 2.0 • 4 gigabytes of RAM | • 支持使用Visual Studio 2013/2015/2017/2019的开发,同时Visual Studio 2017/2019与Visual Studio 2015使用相同的安装包。 |
| Linux | • Ubuntu 14.04或更高版本(含Ubuntu20.04),X86架构的64位系统拓展,ARM处理器,ARM64处理器 • 基于AMD64的处理器@ 1.8+ GHz • USB 2.0 • 1 gigabyte of RAM | • GCC 4.9和Clang 3.5都经过了广泛的测试,但任何支持C ++ 11的编译器均可兼容,包括GCC 4.9或更高版本,Clang 3.1或更高版本以及Android NDK r9e或更高版本。 |
| Android | • Android OS 4.4.2 (KitKat) + •ARMv7a/ARM64v8a处理器@ 1.5 ghz+ • USB 2.0主机支持(支持OTG) • 512 megabytes of RAM | • GCC 4.9和Clang 3.5都经过了广泛的测试,但任何支持C ++ 11的编译器均可兼容,包括GCC 4.9或更高版本,Clang 3.1或更高版本以及Android NDK r9e或更高版本。 |
我们提供了如下版本的SDK:
下载请访问:下载地址 。
首先,在如下地址 Orbbec Sensor Driver for Windows下载最新版本的驱动程序, 然后运行驱动程序:
1.点击安装按钮开始安装。
2.在驱动安装向导窗口点击"下一步"。
3.看到如下窗口,说明驱动已正确安装。
4.安装完成后,点击"完成"按钮结束安装。
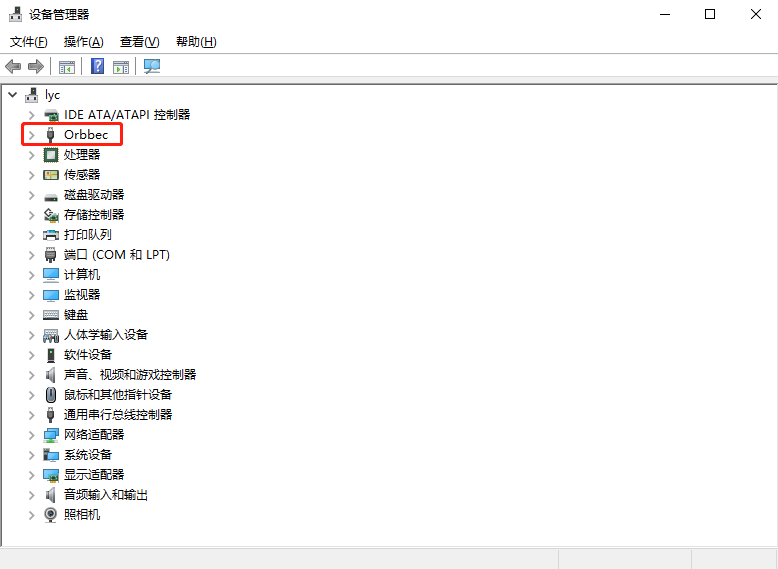
5.当完成安装驱动程序后,您可以将设备连接到PC端,然后在设备管理器中,您将看到新的orbbec设备。
1.将OpenNI2 SDK sdk/windows拷贝到一个目录, 将当前目录定义为 $OpenNI_SDK_HOME。
2.新建一个项目或者打开一个已存在的项目。
3.在Visual Studio菜单中,打开“项目”菜单,然后选择“项目属性”。
4.在“ C / C ++”部分的“常规”节点下,找到“附加包含路径”,然后添加“

5.在链接部分的“常规”节点下,找到“附加库目录”,然后添加“ \x64-Release”。

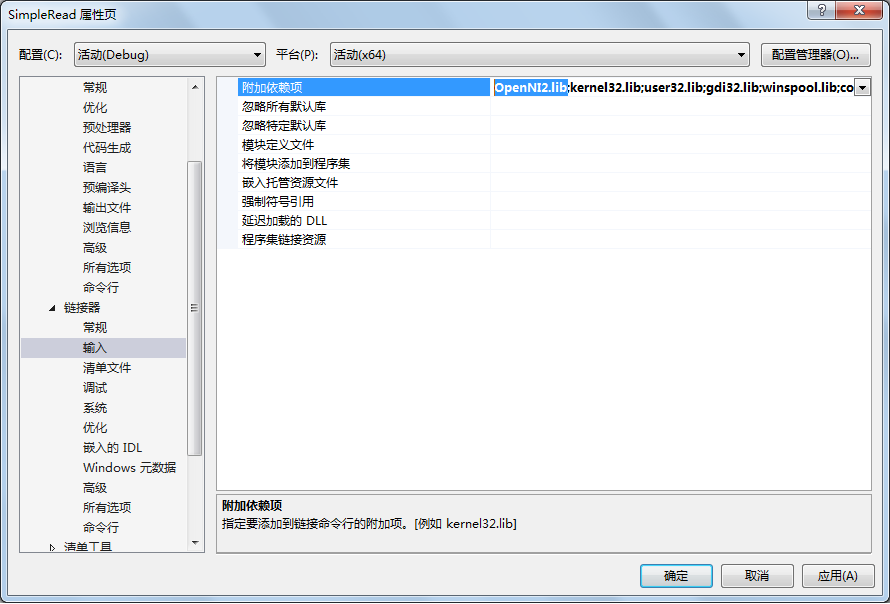
6.在链接部分的“输入”节点下,找到“附加依赖项”,然后添加OpenNI2.lib。
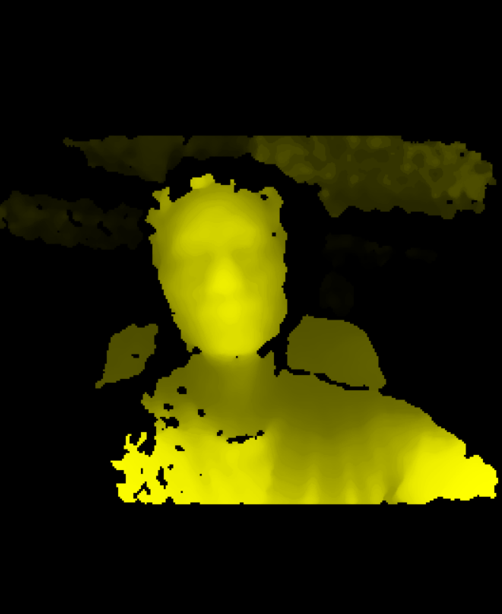
在\x64-Release\下,运行NiViewer.exe将看到下面的显示:
Linux平台下设备作为普通的CMOS相机加载,目前流行的Linux平台都已经内置了相应驱动,不需要额外安装。
但需要安装以下依赖库:
freeglut3
1.首先连接相机和电脑,通过以下命令行查看设备:
此时,可以查看到相机设备的PID/VID,接下来通过OpenNI SDK查看深度图像。
2.在官方的开发者社区获取对应平台的SDK资料,网址:OpenNI SDK for Linux
3.接下来安装Sample运行环境,按照安装必要的库,命令行如下:
4.接下来运行Sample,在SDK路径下的tools文件夹中提供了工具NiViewer,需要通过chmod修改文件权限。以NiViewer为例,使用sudo命令执行程序,命令行如下:
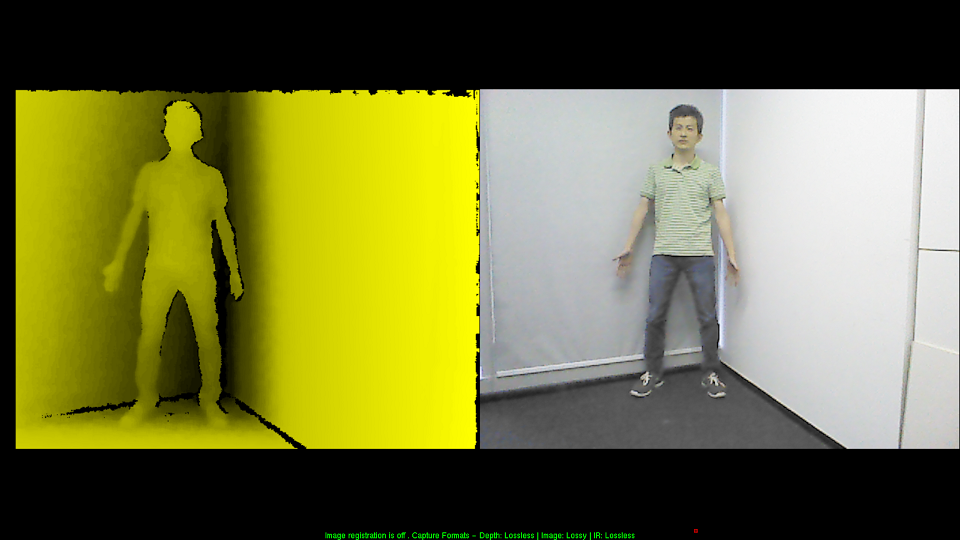
将看到下面的显示:
Android平台下,由于底层是基于Linux平台的,已经内置了相机的相应驱动,不需要额外安装。
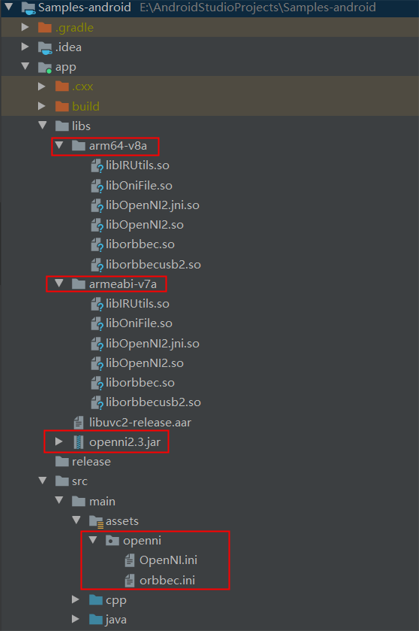
OpenNI2 SDK 提供给Android用户的库包括两部分,5个so动态库文件和1个jar文件:
两个ini配置文件
so库以及jar文件放在接入工程Module的libs目录下,ini文件放在接入工程的Module的app->src->main->asset->openni目录下
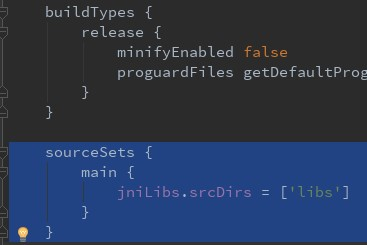
在Module的build.gradle中配置重新指定jniLibs目录,最后同步整个工程
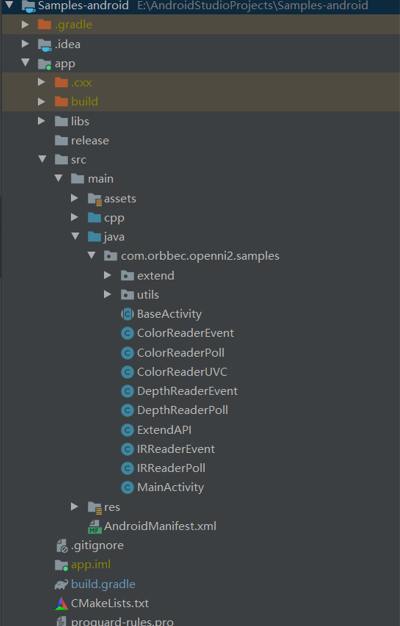
Samples-android工程结构
如Depth输出示例