











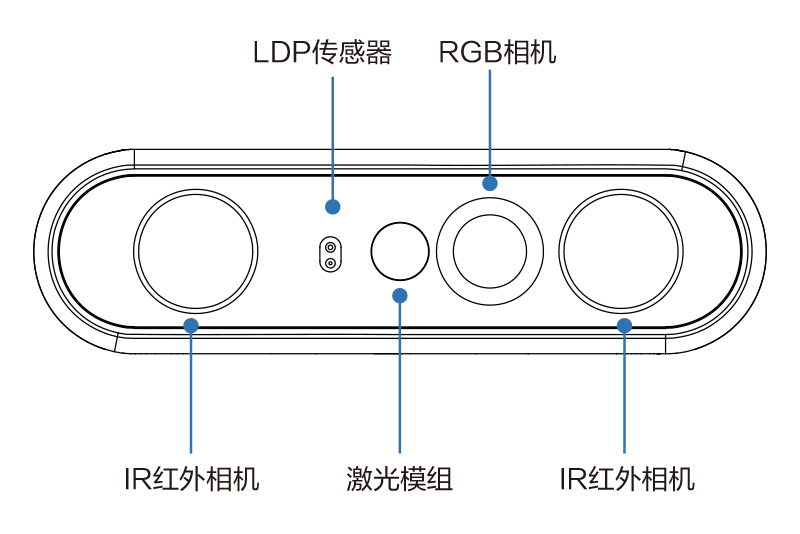
Gemini2
Orbbec Gemini 2是基于双目结构光的新一代3D相机产品,搭载全新MX6600深度芯片



| 基本参数 | 适用环境 | 室内/半室外 |
| 推荐工作范围 | 0.2m - 5m | |
| IMU | 三轴 线加速度 + 三轴 角速度 | |
| UVC相机 | 支持USB 3.0 & USB 2.0 | |
| SDK | Orbbec SDK | |
| 深度参数 | 深度技术 | 双目结构光 |
| 双目基线 | 50mm | |
| 相对深度精度 | ≤ 2% (1280x800@2m & 81% ROI) | |
| 最小深度*1 (Min-Z) |
深度图像:0.15m LDP:1mm |
|
| 深度工作模式 | ||
| Unbinned Dense Default:精度和质量优先 | ||
| Unbinned Sparse Default:平衡质量与功耗,提升低反和半室外效果 | ||
| Binned Sparse Default:低功耗,小盲区,高帧率 | ||
| 深度FoV*2 | H: 91° / V: 66° / D: 101° ± 3°@2m | |
| 深度图像分辨率@帧率*3 | ||
| 1280 x 800@30fps | ||
| 640 x 400@60fps | ||
| 深度传感器快门方式 | 全局快门 | |
| RGB参数 | 彩色相机FoV*2 | 16:9 H: 86° / V: 55° / D: 94° ± 3° 4:3 H: 63° / V: 50° / D: 75° ± 3° |
| 彩色图像分辨率@帧率*4 | 1920 x 1080@30fps 1280 x 720@60fps |
|
| 彩色传感器快门方式 | 卷帘快门 | |
| 电气参数 | 供电建议 | DC 5V & ≥1.5A |
| 功耗 | 平均功耗 < 2.5W | |
| 物理参数 | 工作温度 | 0℃ - 40℃ |
| 尺寸 | 90 x 25 x 30 mm ± 0.5mm | |
| 数据及供电端口 | USB Type-C 母座 | |
| 多机同步端口 | 8-Pin 母座 (需配合外接线材使用) | |
| 安装方式 | ● 1x 1/4-20 UNC 螺纹安装孔 (适用于三脚架) | |
| ● 2x M3 螺纹安装孔 (适用于整机集成) | ||
备注:
*1、深度输出图像最小距离是0.15m,但在双目盲区内,无深度图像输出情况下,辅以LDP点测距,可以输出点距离数据,单位1mm。
*2、H = 水平(Horizonal) FoV, V = 垂直(Vertical) FoV, D = 对角(Diagonal) FoV
*3、USB 3.0下支持深度的1280x800@30fps和RGB的1920x1080@30fps同时输出。
*4、BS模式下,USB 3.0下支持深度的640x400@60fps和RGB的1280x720@60fps同时输出。
